
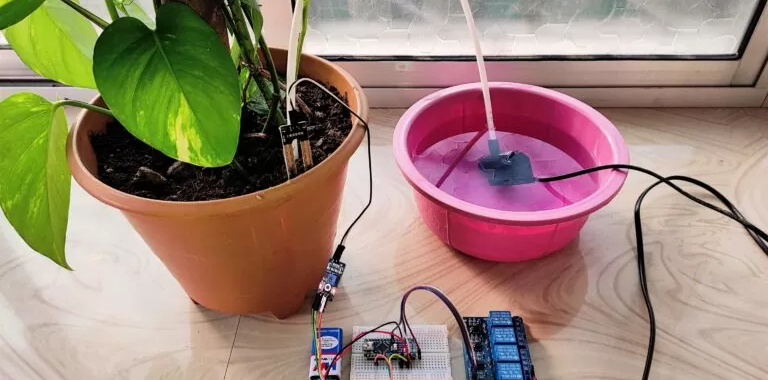
Arrosage automatique
Sommaire1 Objectif2 Composants utilisés :3 Logiciels utilisés4 Ressources sur le web Objectif Réaliser de A à Z un dispositif d’arrosage automatique pour des plantes, qui déclenche une arrivée d’eau seulement en cas de besoin afin d’entretenir vos plantes en votre absence. Ce dispositif pourra être utilisé en extérieur alimenté par un mini panneau solaire. Composants…






{kind=link}
{kind=link}